












Son güncelleme: 24.08.2023
Takip Robotu Projesi Murat Han Hocaoğlu ve Ulaş Güven’in 3DEXPERIENCE Platform üzerinden hazırladığı İstanbul BİLGİ Üniversitesi Mekatronik Mühendisliği Bölümü bitirme projesidir.
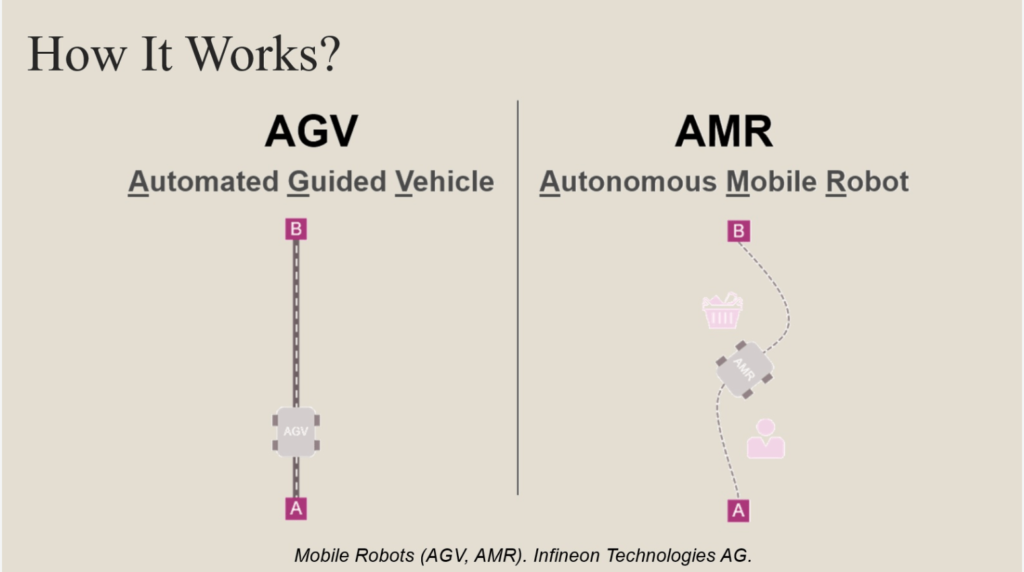
Bu projede UWB sensörü bazlı çalışan bir Takip Robotu 3DEXPERIENCE Platformda tasarlanmıştır. Projede en temelde takip için UWB yani Ultra Wide Band sensör teknolojisi kullanılmıştır. Ultra Wide Band(UWB) teknolojisi kullanılmasındaki asıl amaç ise kendisine benzer ultrasonik veya kamera temelli takip sistemlerinin AGV(Automated Guided Vehicle) aksine takip robotunun AMR(Autonomous Mobile Robot) kullanması yani istenilen her ortamdan her türlü hedefi takip edebilmesi amaçlanmıştır.
Yurtiçi ve Yurtdışı literatür araştırması gerçekleştirerek otonom mobil takip robot projemizi geliştirerek hazırlamaya karar verdik. İlk araştırmamızı tamamladıktan sonra ise artık projemize başlayabilirdik.
İlk olarak 3DEXPERIENCE Platformunun PLM kısmında çalışmalarımızı tamamladık. Dashboard yani kendi çalışma alanımızı hatta ofis diyebileceğimiz yerimizi oluşturduk. İçine CBI (Collaborative Business Innovator) ve CII (Collaborative Industry Innovator) ile ilgili ihtiyacımız olan rolleri farklı sekmelere yani ofis odalarımıza yerleştirdik ve gerekli uygulamaları gerçekleştirdik. Artık 3DEXPERIENCE platformdaki Home Office’imiz ve içindeki çalışma odalarımız hazır diyebiliriz. Ayrıca güzergahımızı yani bu projedeki ilerleyiş şemamızı oluşturduk ve gerekli ilerlemeleri de oraya işledik.
Başka bir taraftan ise ihtiyacımızın olduğu tüm parçaları yurt dışından ve yurt içinden temin ettik. Parçalarımızın hepsini temin ettikten ve gerekli ölçüleri aldıktan sonra artık 3DEXPERIENCE üzerinden tasarım yapmaya hazırdık ve çalışmalarımıza başladık.

Robotumuzun temel parçalarını oluşturan gövdesinin ve tekerleklerinin çizimini SOLIDWORKS Connected üzerinden tamamladık ve 3DSpace üzerinden kendi çalışma alanımıza kaydettik. Parçalardan aldığımız ölçülere göre gerekli revizyonları yaptık ve bir önceki çalışmalarımızla karşılaştırdık.
Bizim için en uygun olacağını düşündüğümüz parçaları elde ettikten sonra 3 boyutlu yazıcımızdan parçaları üretmeye başladık.
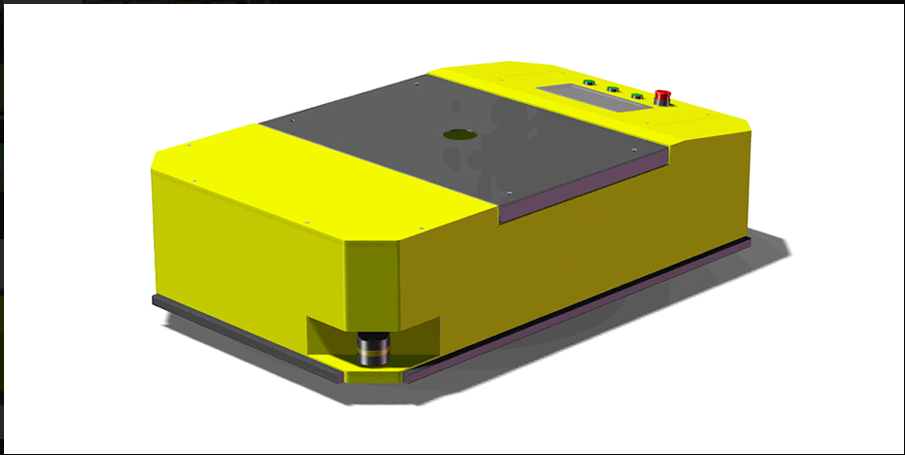
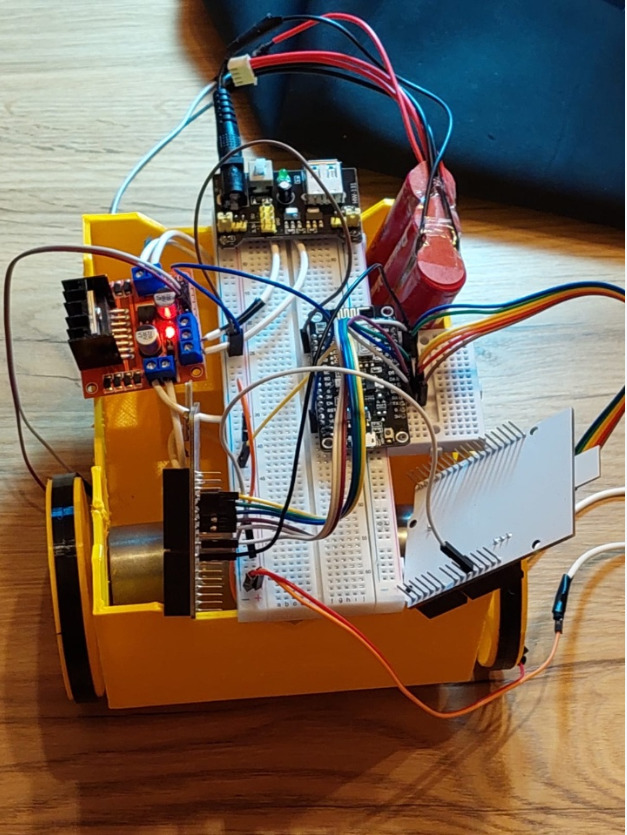
Bir sonraki adımda ise gövdemizin üzerine temel elektronik elemanlarımızı yani motorumuzu, anakartımızı, sürücülerimizi , bataryamızı ve projemizin kalbi olan UWB sensörünü ekledik. Sonuç olarak ise robotumuzun ilk hali ortaya çıktı.
Robotun ilk hali ortaya çıktıktan sonra ise algoritma çalışmalarına başladık. Robotumuzun mesafeye dayalı takip algoritmasını kağıt üzerinde hesaplamalar ile birlikte oluşturduk. Bu algoritmaya göre robotumuz sahip olduğu 3 anchor’un ve takip edeceği kişide bulunan tag’in x,y ve z koordinatlarını kullanarak 3 farklı mesafe hesaplayacak. 3 farklı Anchor ve 3 farklı mesafe kullanmamızın sebebi ise sensörleri robotun önünde, sağında ve solunda konumlandırarak robotumuzun bu 3 yöne de dönmesini sağlamaktır. Robotumuz hesapladığı 3 farklı uzaklık ile de 3’nün kesişiminde olan noktayı 1 metre ara ile takip edecek. Uzaklığın 1 metre olmasının sebebi ise temelde güvenlik mesafesini korumak. Yani robotumuz hedefe 1 metreden uzaksa onu takip edecek ve eğer mesafe 1 metreden aza düşerse çarpmamak için duracak. Gecikmeleri de hesaba katarsak 1 metre bizim için yeterli olmaktadır.
Robotumuz hesapladığı 3 farklı uzaklık ile de 3’nün kesişiminde olan noktayı 1 metre ara ile takip edecek şekilde kodumuzu yazdık.
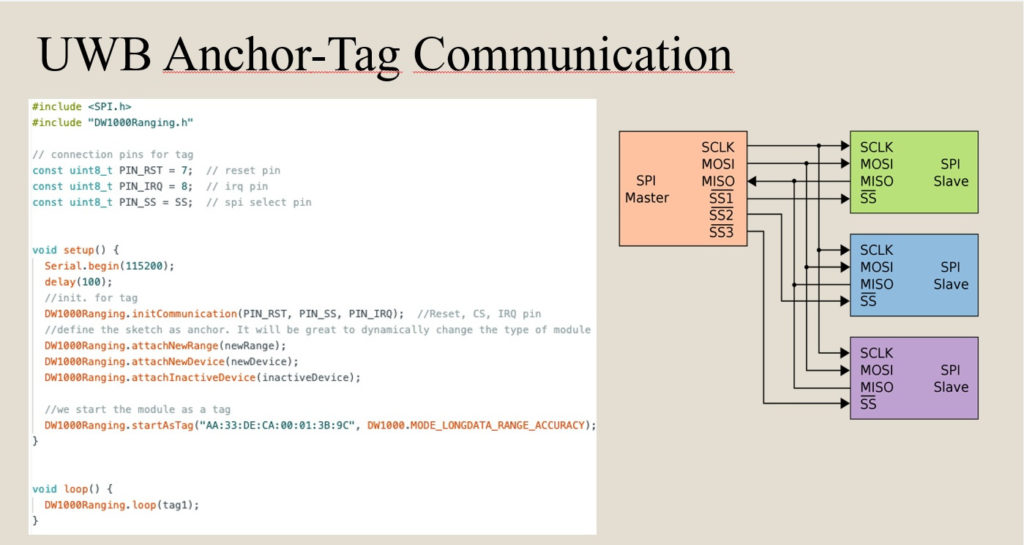
Sonrasında bu takip robotumuzun algoritmasını çalışır bir kod olarak yazıp UWB sensörlerimize aktarmaya çalıştık.
Tam bu adımda büyük bir problemle karşılaştık. Bu problem, bizim tüm tasarımımızı üzerine yaptığımız DWM3000 serisine ait yeterli kaynak ve örneklerin olmamasıydı.
Bu sorunu aşmak için de DWM3000 serinin bir önceki modeli olan DWM1000’nin kullanıldığı projeleri örnek aldık. DWM1000 için yazılan kodları ilk önce bütün olarak inceledik. Sonrasında bütünden parçaya giderek tek tek kodlamaları kendi DWM3000 serisi sensörümüze göre uyarlayıp yazılı algoritmamızı oluşturduk.
Algoritmamızı oluşturduktan sonra ise 3 Anchor alıcımız ve 1 1 Tag vericimiz istediğimiz bir biçimde iletişim kurdu ve projemiz tamamlanmış oldu.
Sonuç olarak 3DEXPERIENCE Platformunu bir çok farklı şekilde kullanma fırsatı bulduk. Motor ve sensörlerle hem hesap olarak hem de pratik olarak ilgilenme fırsatı bulduk.
Ayrıca 3DEXPERIENCE Platformunu detaylı kullanarak platform hakkında yeni şeyler öğrenme fırsatımız oldu.
Bir sonraki projelerde görüşmek üzere.
