















Son güncelleme: 24.08.2023
Bir önceki yazımız olan “ROBOTLAR Mekatronik ve FRC” de robotların ne olduğunu çeşitlerinin neler olduğunu ve Mekatronik kavramının ne anlama geldiğini anlattık. Bu kavramlardan hareketle robot yarışması FRC’den bahsettik. Bu yazımızda ise bir Robot üretimi için hangi teori ve metoda göre işlem yapılması gerektiğini, Robot imalat ve Ar-Ge çalışmalarının hangi esaslar üzerine bina edildiğini ele alacağız. FRC için TEKYAZ olarak mentorluğunu yapmış olduğumuz robotun imal edilişindeki aşamalardan “Robot Nasıl Yapılır-Mekanik ve FRC” yazımızda kabaca bahsedeceğiz. Bu yazımızda robot mekaniğinden bahsedip robot kontrolüne ise “Robot Nasıl Yapılır? Elektrik-Elektronik ve Programlama” yazımızda değineceğiz.
Robotların bir görevi yerine getirmek için kullanılan işçi olduklarından bahsetmiştik. Bu nedenle bir robot imalatının ilk aşaması robotun hangi görevi yerine getireceği olacaktır. Buradan hareketle yapılan işe göre robotun ne yapıda olması gerektiği kararlaştırılıp robot mekaniği oluşturulacaktır. Robot Mekaniği teorisi ortaya konulduktan sonra ilgili mekanik esaslarına dayanarak mekanizmayı oluşturacak sistem oluşturularak robotun işlevleri yerine getirecek uzuvları ortaya çıkmış olacaktır.
Robot Mekaniği’ni kinematik, dinamik olacak şekilde ayırabiliriz. Kinematik konuları içinde ileri kinematik, ters kinematik ve robotun yörünge planlaması konuları yer almaktadır. Bu işlemler yapıldıktan sonra Robot Dinamği’ne geçilebilir. Robot Dinamiği’nde ise robotun ne kadarlık kuvvet veya tork ile çalışacağı konularından hareketle yörünge planlaması ile birlikte robot kontrolüne geçilebilir. Bu işlemler neticesinde robotun kontrolünü sağlamak basitleşmektedir. Robot Mekaniği ile birlikte işlem sadece eyleyici, sensör ve diğer arabirimlere kalarak bu bilgiler neticesinde programlama yükü oldukça hafiflemiş olacaktır.
Robotun hangi işlevi yerine getireceğine karar verdikten sonra öncelikle robot kinematiği ile başlayıp sırasıyla yörünge planlaması ve robot dinamiğinden bahsederek Robot Mekaniği teorisini kabaca anlatmış olalım. Daha sonrasında robot dinamiğinden yola çıkarak robot kontrolüne geçmiş olacağız.
Robot Mekanik Sınıflandırma
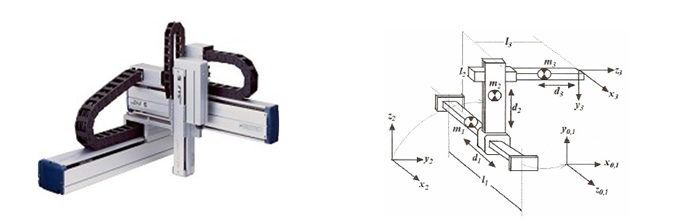
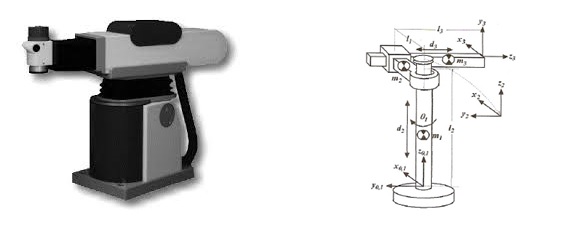
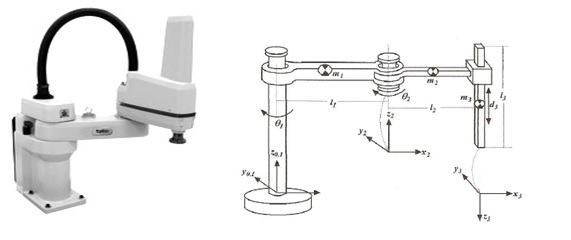
Robotlar mekanik özelliklerine göre Seri ve Paralel Robotlar olmak üzere ikiye ayrılır. Her ikisi içinde eklemlerinin durumuna göre harf sınıflandırması mevcuttur. Seri robotlarda eklem ve uzuvlar birbirine seri olarak bağlıdır. Yani Robot, sıra ile uzuv (link)-eklem (joint) şeklinde gitmektedir. Paralel robotlar ise ana çerçeve ile yük arasında pek çok eklemin birbiri ile aynı konumda olacak şekilde paralel olarak bağlanması ile oluşmaktadır. Seri robotlar, geniş çalışma uzayına, az mekanik parçaya ve daha az karmaşık kinematik denklemlere sahiptir, ancak kaldırabildikleri yük mekanik yapılarının toplam ağırlığına göre düşüktür. Paralel robotlar da ise ilgili özellikler tam tersi şekildedir. Aşağıdaki görselde, seri (solda) ve paralel (sağda) robot tipleri yer almaktadır.

Günümüzde en yaygın olan ve en çok kullanılan ve de Endüstri 4.0 devriminde de aktif rol alacak olan robot tipleri Seri Endüstriyel Robotlardır. İlgili Robot Mekaniği konularını bu robot tipi üzerinden devam ettireceğiz. Seri robot tipleri de kendi içinde eklem tipine göre harf sınıflandırmasına sahiptir. Genel olarak iki tip eklem bulunmaktadır, bu eklemler; dönel ve prizmatik eklemlerdir. Dönel eklem “R” harfi ile (Revolute), prizmatik eklem ise “P” harfi ile (Prismatic) sembolize edilir. Dönel eklem açısal, prizmatik eklem doğrusal yer değiştirme gerçekleştirir. Bu eklemlerin uzuvlar arasındaki yerleşimine göre bu harfler ardı ardına konularak robotun nasıl bir yapıya sahip olduğu özetlenmiş olur. Örneğin Kartezyen Robot, 3 adet prizmatik eklemden oluştuğu için “PPP” şeklinde isimlendirilebilir. Bu robotlara 3 boyutlu yazıcılar örnek gösterilebilir. Aşağıdaki görsellerde ilgili örnek robot tipleri ve eksen koordinat yerleşimleri gösterilmiştir.
Robot Kinematiği
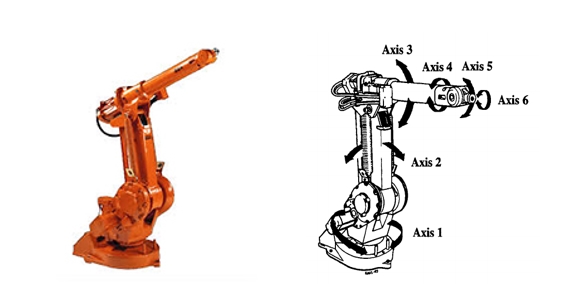
Yukarıdaki bilgilerden hareketle Robot Kinematiğini, hemen hemen her üretim tesisinde gördüğümüz 6 serbestlik derecesine sahip RRRRRR tipi endüstriyel robotlar üzerinden devam ettirelim. Öncesinde serbestlik derecesi tanımından bahsedecek olursak;
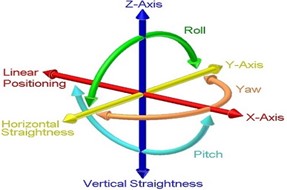
Serbestlik derecesi, mekanik bir sistemin yapılandırmasını tanımlayan bağımsız parametrelerin sayısıdır. Robotlarda eklemler kastedilerek eksen şeklinde de kullanılmaktadır. 3 boyutlu uzayda X,Y ve Z koordinatlarına bağlı olarak 3 öteleme ve 3 dönme serbestliği bulunmaktadır. Bu nedenle 6 serbestlik derecesi içinde bulunduğumuz uzayda yeterli şekilde hareket kabiliyeti sağlamaktadır. Aşağıdaki şemada serbestlik derecelerini gözlemleyebilirsiniz.
Robot Kinematiği konusu bize robotun işlevini belirledikten sonra robotun hangi pozisyona ve hangi yönelim ile geleceğinin bilgisini verir. Robot kinematiği ileri ve ters olarak ikiye ayrılmaktadır. İleri kinematik konusu robotun ilgili uzuv pozisyonuna göre uç işlevcisinin konum ve yönelimini verecektir. Ters kinematik ise konum ve yönelimi verilen uç işlevcinden hareketle robot uzuvlarının pozisyonlarını verecektir.
1.İleri Kinematik
Seri robotlarda Robot Kinematiğine başlarken öncelikle ileri kinematik ile başlanması uç işlevcinin konumu uygulamada önemli olacağından kolaylık sağlayacaktır. Ayrıca seri robotlarda ters kinematik işlemleri ileri kinematiğe göre daha karmaşıktır.Bu konular üniversitelerde Mühendislik Fakültelerinde Robot Kinematiği dersleri içinde detaylı anlatılmaktadır. Burada kabaca değinip bu mekanik teorisinden ne şekilde dinamiğe ve kontrole ulaşıldığı bilgisine değinmek ana konumuz olacaktır.
Robot Kinematiği çıkarmanın ilk aşaması olan D-H tabloları, robotun her bir eklemine yerleştirdiğimiz koordinat sistemindeki dönmeler ve bu koordinat sistemine göre oturtulmuş olan uzunluk değerlerinin yazılmasından elde edilen tablolardır.
İleri kinematik, eklem değişkenleri ile uç işlevcisinin konumu ve yönelimini ana çerçeveye göre hesaplar. Her bir ekleme bir koordinat sistemi yerleştirilse komşu iki eklem arasındaki ilişki bir dönüşüm matrisiyle elde edilir. Dönüşüm matrisi şeklinde ifade edilir. İlk ekleme ait dönüşüm matrisi ilk eklem ile ana çerçeve arasındaki ilişkiyi tanımlarken, son ekleme ait dönüşüm matrisi uç işlevcisi ile son eklem arasındaki ilişkiyi ifade eder. Arka arkaya sıralanan bu eklem dönüşüm matrisleriyle ana çerçeve ile uç işlevci arasındaki ilişki tanımlanır. Bu ilişkiye de ileri kinematik denir. Ana çerçeve ile uç işlevci arasındaki ilişki;

şeklinde elde edilir.
Denavit-Hartenberg (D-H) Yöntemi;
Bu yöntemde dört ana değişken kullanılarak robot ileri kinematiği çıkarılır. Eklemlere yerleştirilen koordinat sistemleri kurallara göre belirlendikten sonra eklem değişkenleri aşağıdaki ifadeler göz önünde bulundurularak isimlendirilir.
ai-1, Zo ile Z arasında X boyunca belirlenen uzunluktur.
αi-1, Zo ile Z arasında X boyunca ölçülen açıdır.
di, Xo ile X arasında Z boyunca belirlenen uzunluktur.
θi, Xo ile X arasında Z boyunca ölçülen açıdır.
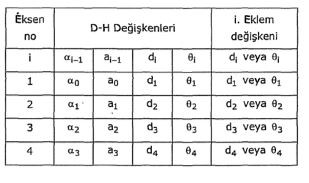
Buradan Genel Eklem Dönüşüm (Transformasyon) Matrisi elde edilir;
![]()
Tablodan elde edilen değerlerle oluşturulan dönüşüm matrisleri robotun ana uzvundan son uzvuna doğru çarpılarak ileri kinematiği çıkartılmış olur.
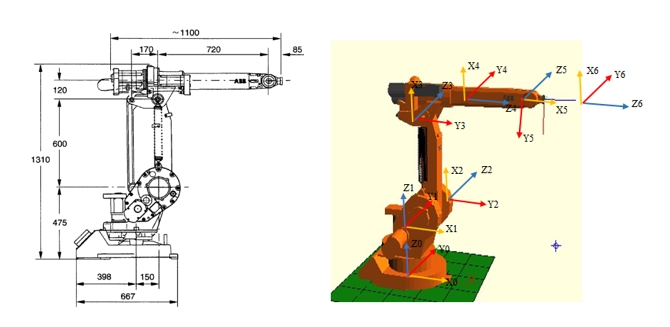
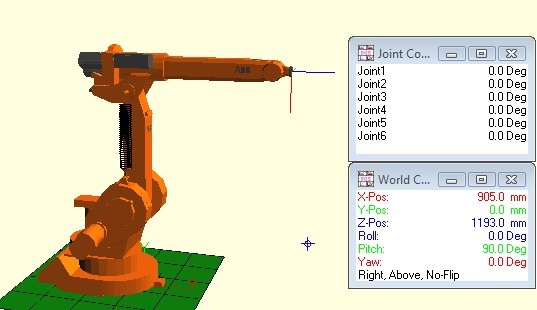
Aşağıda ABB IRB 1400 isimli 6 eksenli robotu üzerinden İleri Kinematik hesabı yer almaktadır.
| i | αi-1 | ai-1 | di | Ѳi | Değişken |
| 1 | 0 | 0 | 476 | Ѳ1 | Ѳ1 |
| 2 | -90 | 100 | 0 | Ѳ2-90 | Ѳ2 |
| 3 | 0 | 597 | 0 | Ѳ3 | Ѳ3 |
| 4 | -90 | 120 | 720 | Ѳ4 | Ѳ4 |
| 5 | 90 | 0 | 0 | Ѳ5+90 | Ѳ5 |
| 6 | -90 | 85 | 0 | Ѳ6 | Ѳ6 |
Robot Eksen Koordinat Takımlarından Çıkarılan D-H Tablosu
*Robotun bazı uzunluk değerlerinde, farklı program üzerinden yapılması sebebiyle farklılıklar oluşabilmektedir.*
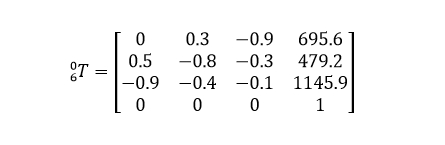
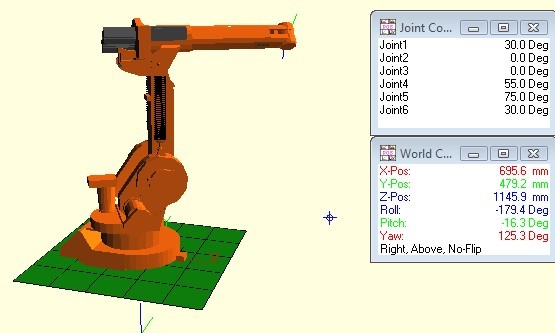
D-H tablosundan elde ettiğimiz verileri yukarıda anlatıldığı gibi transformasyon matrisine yerleştirip çarpma işlemi yaptığımızda İleri Kinematik matrisi aşağıdaki gibi olmaktadır.;
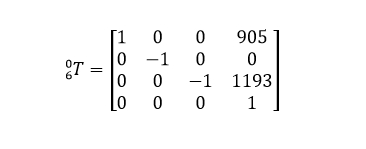
İlgili değerlere program üzerinden deneme yapılarak bakılacak olursa, aynı verilere ulaşıldığı görülür. Buradan açılar değiştirilerek robotun uç işlevcisinin konum ve yönelimi bulunur.
Robotlar üzerine yaptığımız konumlama işlemleri benzer şekilde SOLIDWORKS 2016 ile birlikte gelen “Montaj İlişki Denetleyecisi” komutu ile de gerçekleştirilebilmektedir. Bu komut ile ilgili olarak aşağıdaki videomuzu izleyebilirsiniz.
SOLIDWORKS Montaj İlişki Denetleyicisi ile Robot Pozisyonlama
2.Ters Kinematik
Ters kinematik, robotun uç işlevcisinin ana çerçeveye göre konumu ve yönelimi verildiğinde manipülatörün bu konuma ve yönelime gelebilmesi için gerekli eklem değişkenlerinin bulunmasıdır.
Robotların ileri kinematiğinde eklem açıları ve robotun fiziksel değişkenleri bulunur. Bulunan bu değişkenler dönüşüm matrisinde yerlerine konulup ana çerçeveden uç işlevciye doğru robotun yönelimi ve konumu hesaplanır. Ters kinematik bir başka deyişle, uç işlevcinin ana çerçeveye göre yönelimi ve konumu verildiğinde, robotun bu yönelim ve konuma ulaşabilmesi için gerekli olan yer değiştirme setlerinin hesaplanması şeklinde tanımlanır. Ters kinematikte karşılaşılan denklemlerin doğrusal olmamasından dolayı bu denklemlerin çözümleri karmaşıktır. Elde edilen doğrusal olmayan (Non-Lineer) denklemler, tekil çözüm üretmeyip birden fazla çözüm üretebilir.
Ters kinematik, eklemlerin yapısına bağlıdır. Eğer robot prizmatik eklemlerden oluşuyorsa ters kinematik problemin çözümü kolaylaşırken, robottaki döner eklem sayısı arttıkça problemin çözümü de o derece zorlaşmaktadır.
Aynı uç işlevci düzenleşimi için birden fazla çözüm olabilir. Ters kinematik çözüm sayısı robotun serbestlik derecesinin yanında aynı zamanda eklem değişkenlerine de bağlıdır. Her bir eklemde uzuv uzunluğu ve eklem kaçıklığının olması çözüm sayısının artmasına neden olur.
Ters Kinematik Çözüm Metodu;
D-H tablosundan elde edilen eklem dönüşüm matrisleri ile robot ileri kinematik matrisi bulunur. Buradan robotun konumunu veren eklem açıları için sırasıyla her bir eklem dönüşüm matrisinin tersi alınarak ileri kinematik matrisiyle eşitliğin karşı tarafı çarpılır. Matrisin kendisi ile çarpımı ‘I’ birim matrisini verir ve böylelikle eşitlikten bir eklem dönüşüm matrisi çıkarılır.
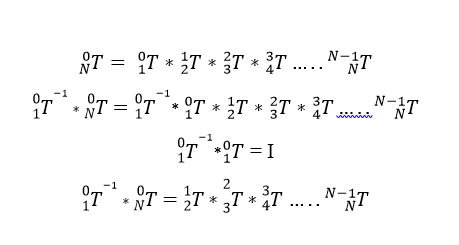
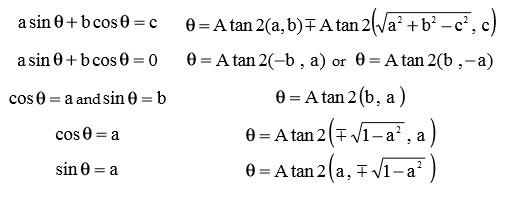
Oluşturulan dönüşüm matrislerinden konum bilgisini elde etmek için kullanılan bazı trigonometrik eşitlikler;
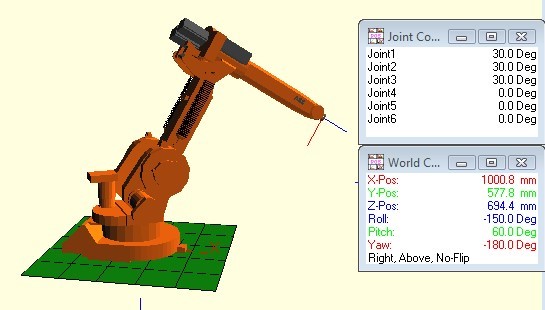
Ters kinematik bilgilerinden hareketle robot için örnekler aşağıdaki gibi olacaktır.
Px=1000.8, Py=577.8, Pz=694.4 verildiğinde bulunan açılar:
Ѳ1 =30, Ѳ2 =30, Ѳ3 = 30 , Ѳ4 =Ѳ5 = Ѳ6 = 0
Robot Yörünge Hesaplamaları
Robot ileri ve ters kinematik konularında şuana kadar robot konum ve yönelimini hesaplayarak robot yer değiştirmesine değindik. Robotun düzgün çalışması, istenilen pozisyona uygun şekilde gitmesi robotun hız ve ivmesine bağlıdır. Robotun açısal ve doğrusal hız hesaplaması Jakobiyen metodu ile bulunabilir. Bu konunun uzun ve karmaşık olması sebebiyle üzerinde durmayacağız. Ayrıca elde ettiğimiz yer değiştirme ve hız verilerinden hareketle robotun çalışma uzayı içinde rahat hareket edebilmesi, titreşime maruz kalmaması ve pozisyon geçişlerinde yumuşaklığın sağlanması işlemi de Yörünge Planlaması olarak geçmektedir.
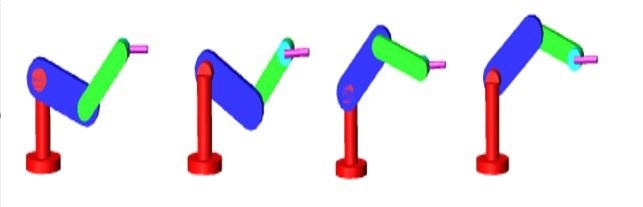
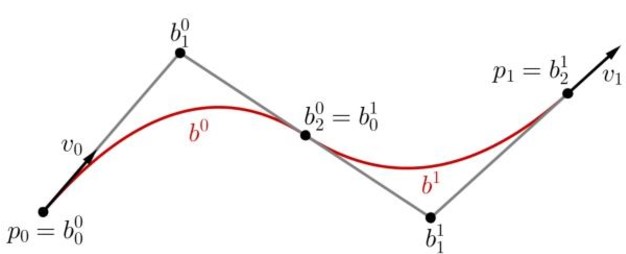
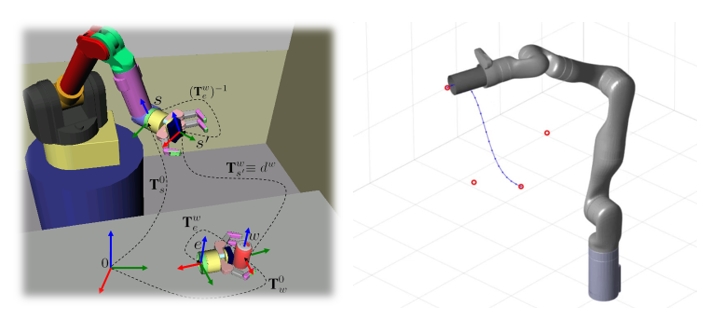
Yörünge Planlamasında robotun uç işlevcisi için belirlenen başlangıç ve bitiş noktası arasına konulan geçiş noktaları ve bu geçişlerdeki aniliği giderecek yumuşak geçiş noktaları belirlenir. Burada robot için Kartezyen ve Eklem uzayı olmak üzere iki çeşit yörünge planlaması gerçekleştirilir. Eklem uzayında robotun ilk eksenleri üzerinde durulurken Kartezyen uzayda uç işlevcisi ve bağlı eklemleri üzerinde durulur. Yörünge Planlaması hesaplaması konum, hız ve ivme polinom denklemleri üzerinden Jakobiyende olduğu gibi türev ve integral hesaplaması yapılarak elde edilir. Aşağıdaki şekilde yörünge planlaması için örnekleri görebilirsiniz.
Yörünge planlaması ile ilgili olarak daha fazla bilgi edinmek ve uygulamalarını incelemek için aşağıdaki Türkçe makaleleri inceleyebilirsiniz.
5 Eksenli Robotun Eklem Uzayında Yörünge Planlaması
5 Eksenli Robotta Ters Kinematik Hesaplamalar ve Yörünge Planlaması
Robot Dinamiği
Robotun kinematik ve yörünge hesaplamaları neticesinde robotun sahip olduğu atalet tensörleri, uzuvlarının Jakobiyen üzerinden oluşturulan kütle matrisleri, hızları için oluşturulan Coriolis ve Yer çekim vektörlerinin toplamı ile Tork ve Kuvvet verilerine ulaşılır. Bu kısımda da tork ve kuvvet hesaplarında Lagrange-Euler ve Newton-Euler olmak üzere iki metot kullanılmaktadır. Bu veriler ile robota yörünge planlaması üzerinden konum girilerek robottan çıktı olarak eksen yer değiştirmeleri elde edilir böylelikle robot kontrolü sağlanmış olur. Robot Dinamiği, Robot Kinematiğinden daha uzun ve karmaşık olması sebebiyle detaylarına inmeyeceğiz. Bu konu ile ilgili yukarıda örneklerini yaptığımız robota benzer 6 eksenli endüstriyel robot ile gerçekleştirilen makaleye aşağıdaki linkten erişebilirsiniz. Makale, Newton-Euler yaklaşımı ile oluşturulan Robot Dinamik Modeli ve Kontrolünü anlatmakta olup Türkiye Otomatik Kontrol Ulusal Toplantısı’nda yayınlanmıştır. İlgili makale yukarıda anlatılan tüm bilgilerin özeti niteliğindedir.
6 Eksenli Endüstriyel Robotun Dinamiği ve Kontrolü
Son makalede sonuç kısmı incelendiğinde robot kinematiği ve dinamiği ile birlikte yörünge planlaması ile robot kontrolü ve istenilen şekilde çalıştırma işlemi gerçekleştirilmiş olur. Robot Kontrolü, programlama ve hareket tasarlaması işlem yükleri olmadan bu hesaplamalar vasıtası ile sağlanmış olur. Geriye sadece bu verilerin bir mikrodenetleyiciye ve mikrodenetleyici üzerinden eyleyicilere aktarılması kalmıştır. Bu işlemler tamamlandığında robotun istenilen şekilde kontrol edildiği görülmüş olacaktır.
Robot Mekaniği teorisini kabaca inceledik bu teori üzerinden robot kontrolünün gerçekleşmesi konusuna değindik. Bu işlemler lisans ve yüksek lisans bilgisi gerektirmekte olup Robot Ar-Ge ve yapımında bu yöntemler kullanılarak robot imalatı yapılmaktadır. Robot Mekaniği esasları bu yöntemler üzerine inşa edilmiştir.
Robot Mekaniği, kontrolü ve programlaması bu yöntemler olmadan da gerçekleştirilebilir. Ancak bu yöntemler olmadan, robotun tasarımından hareketine, eyleyicilerin durumlarına ve de robotun programına kadar sistem bütünüyle bizim karar ve kontrolümüze kalmaktadır. Nitekim FRC yarışmasında inşa edilen robotlar lise ve dengi eğitim kurumlarında olması sebebiyle Robot Mekaniği teorisine girilmeden bu şekilde imal edilerek gerçekleştirilmiştir. Bu yazımızda amaç Robot Mekaniğinin bilinmesi ile kontrol işleminin ne şekilde sağlandığı ve Robot Ar-Ge çalışmalarında nelerin baz alınarak üretim yapıldığını aktarmaktır. Diğer yazımız olan “Robot Nasıl Yapılır?-Mekanik ve FRC” de FRC yarışması için yapılan robotun mekanizmasının nasıl oluşturulduğunu kısaca aktarmış olacağız.




