Son güncelleme: 23.08.2023
Bir diğer yazımız olan “Robot Nasıl Yapılır-Robot Mekaniği”nde robotun mekanik esaslarına, yörünge planlaması ve dinamiğine değindik. Robot Ar-Ge çalışmalarında nelerin kullanıldığından ve Robot Kinematik-Dinamik teorilerinden bahsettik. Ayrıca ilgili yazımızda Robot Mekaniği üzerinden gerçekleştirilen işlemler neticesinde robot kontrolü ve istenilen çalışma biçiminin robota nasıl yaptırılabileceğini anlattık. Programlama ve eyleyici tasarlama çalışmalarına bu teorilerin ne derece kolaylık sağladığından bahsettik.
Bu yazımızda ise FRC yarışmasında TEKYAZ olarak mentorluğunu yapmış olduğumuz robotun mekanizmasının ne şekilde yapıldığına değineceğiz. Robot teorisi ve esasları lisans ve yüksek lisans konuları içermektedir. FRC yarışması ise lise, yüksekokul ve dengi eğitim kurumları üzerinden gerçekleştirildiğinden FRC yarışması için hazırlanan robot mekanizması, bu esaslar üzerine girilmeden oluşturuldu. Robotlar bu esaslar olmadan da oluşturulabilir. Ancak bu şekilde imal edilen robotlarda, sistemin tüm hareketleri, programlama ve kontrolü işlemleri robot mekaniği teorisinin sağladığı kontrol ve hesaplama yardımı olmaksızın yapılacağından tüm durumlar göz önüne alınarak yapılması gerekmektedir.
FRC Yarışması ve İçeriği
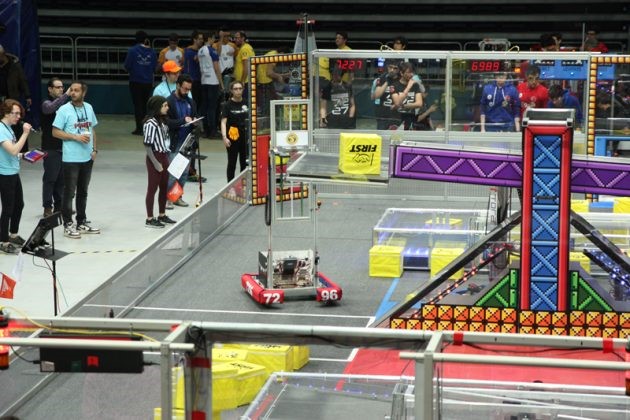
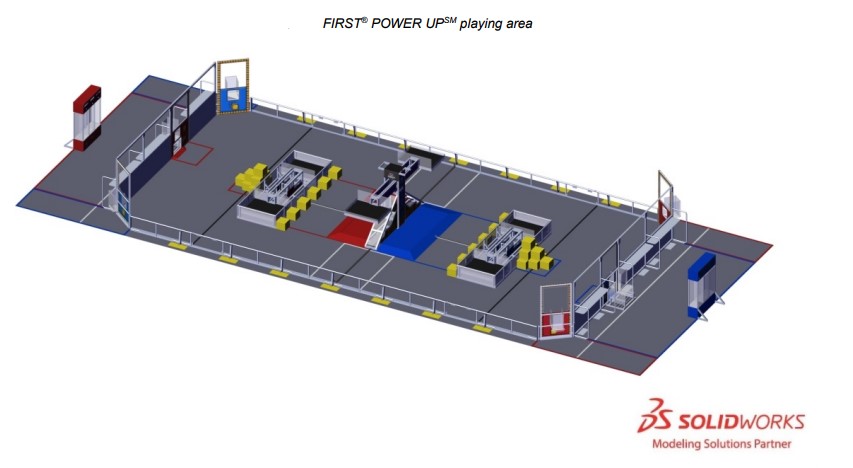
2018 yılı FRC için yapılan robot; yarışma kuralları, saha koşulları ve oyunda ne işlev yapılacağına göre oluşturuldu. 2018 senesi içinde yapılan oyun konsepti Power Up idi. Bu yarışmada robotlar kendilerine verilen küp şeklinde kutuları belirli terazi şeklinde küfelere koymak suretiyle puan toplayarak mücadele verdiler. SOLIDWORKS üzerinden tasarlanan yarışma sahası aşağıda yer almaktadır.
Yarışmanın kuralları ve ne şekilde yapıldığına aşağıdaki belge üzerinden ulaşabilirsiniz.
FRC Yarışması Bilgilendirme Kitapçığı
Bu belge ile birlikte yarışma sahası, puan hesaplamaları ve yarışma kurallarına FIRST YouTube kanalı üzerinden de erişebilirsiniz.
Robot Mekaniğinin Tasarlanması ve Oluşturulması
1.Alt Şase
Yarışma kurallarından hareketle tasarlanacak olan robotun ana işlevi, ilgili küpleri alıp saha içindeki küfelere bırakmak olacaktır. Bu bağlamda robot 3 aşamadan oluşmalıdır. Öncelikle Saha içinde gezinmeyi sağlayacak her yöne gidebilecek tekerlekli bir taban şasesi gereklidir. Bu şase üzerine robotun yüksek küfeye erişebilmesi ve yarışma kuralları gereği boyunun kısalabilmesi için uzayıp kısalabilen bir lift mekanizması yapılmalıdır. Robot hem alçak iken ve de yüksek iken kutuları alabilmesi için robot tutucusu yani gripper mekanizması olacak şekilde robot mekaniğinin oluşturulması planlanmıştır.
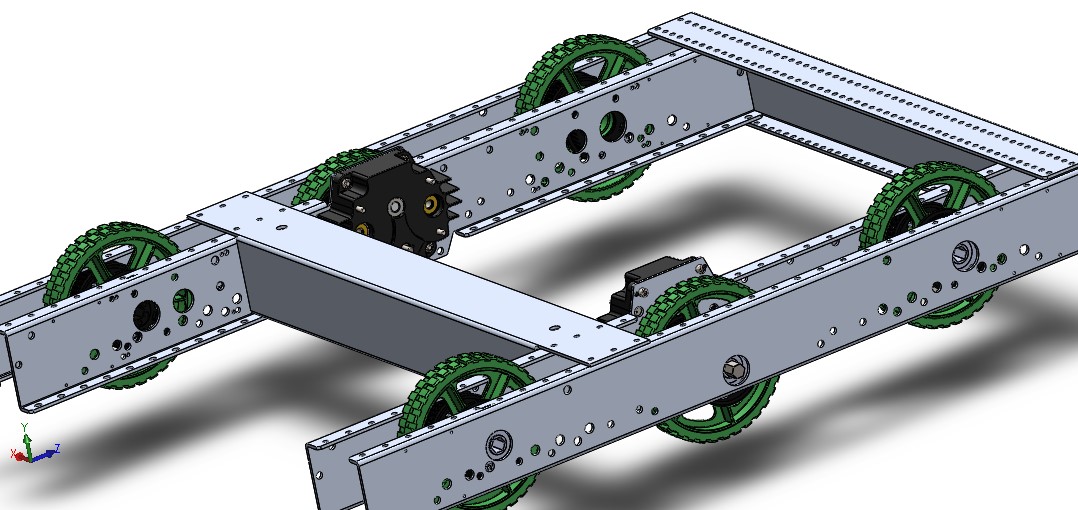
Robot alt şasesi, eyleyici, kontrolcü, sensör ve güç kaynağı yarışma tarafından verilmektedir. Burada genel itibari ile elektrik aksam için malzemeler karşılanmıştır. Robot Mekaniğinin geneli TEKYAZ tarafından verilen SOLIDWORKS eğitimi ile öğrenciler tarafından tasarlanmıştır. Robotun SOLIDWORKS tasarımının tamamlanmış hali aşağıda yer almaktadır. İlgili tasarım, sonrasında doğrudan imalata geçmiştir.
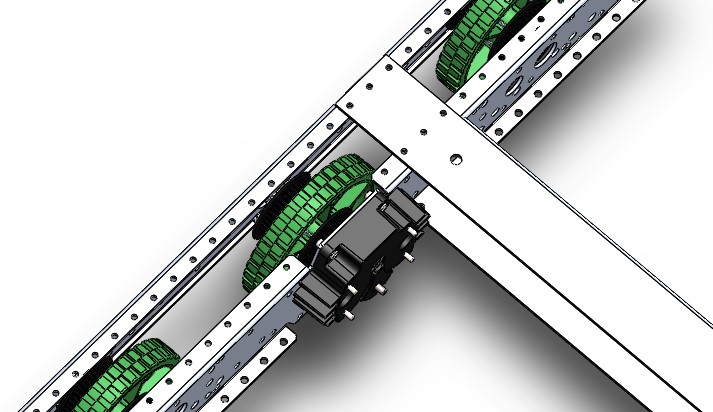
Hareket eden alt şase, tekerlek ve tekerleğin hareketini sağlayacak motor ile birlikte SOLIDWORKS montaj ortamında tasarlanmıştır. Hareket işlemi motor ile sağ-sol ve ileri-geri şeklinde sağlanmaktadır. Aşağıda ilgili montaj yer almaktadır.
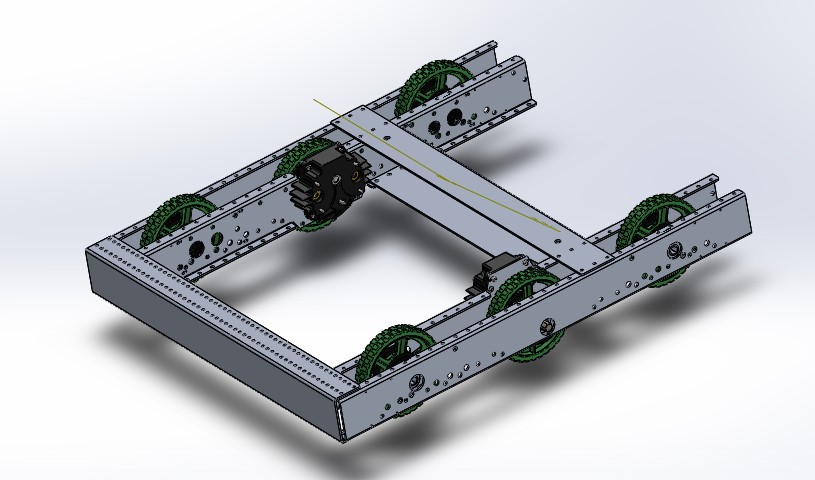
Burada robotun belirli ağırlık kısıtlaması olması sebebiyle robotun şase malzemesi genel olarak sac ve alüminyum sigma profil seçilerek yapıldı. Alt şase dikdörtgen yapıda olup kenarlarına robotun takımını belirten ahşap ve süngerden oluşan bumper parçaları cıvata ve somun yardımı ile monte edildi. Yine kitin içinde bulunan şase tekerlekleri ve bu tekerlekleri eş zamanlı döndürecek motorun geleceği dişliler ile montaj gerçekleştirildi.
2.Lift Mekanizması
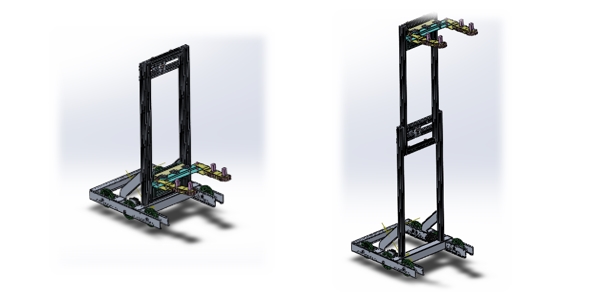
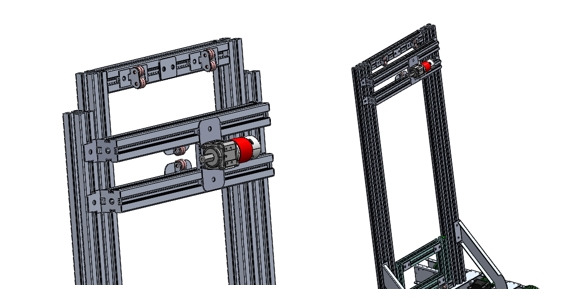
Robotun üst küfeye ulaşmasını sağlayacak ve de gripper mekanizmasını taşıyacak olan lift mekanizması, alüminyum sigma profil ile robotu maksimum yüksekliğe çıkaracak şekilde oluşturuldu. Lift motoru çalışmaz iken robotun sınır yüksekliğini aşmayacak şekilde yapıldı. Mekanizma, robotun arka kısmından elektrik aksamı gelecek şekilde monte edildi.
Lift aksamı güç kaynağı sağlayan akü ile ağırlık yapılarak denge oluşturacak biçimde ve de ön kısma gripper gelecek şekilde konumlandırıldı. Lift hareketini sağlayan motor burada rulmanlar monte edildikten sonra rulman arasından kayış geçirilerek motor miline bağlandı. Böylelikle motor hareket ettikçe lift aşağı ve yukarı hareket etmektedir. Sınırlar ise elektrik enerjisini kesen End-Stop sensörleri ile sağlandı. Aşağıda lift mekanizmasını inceleyebilirsiniz.

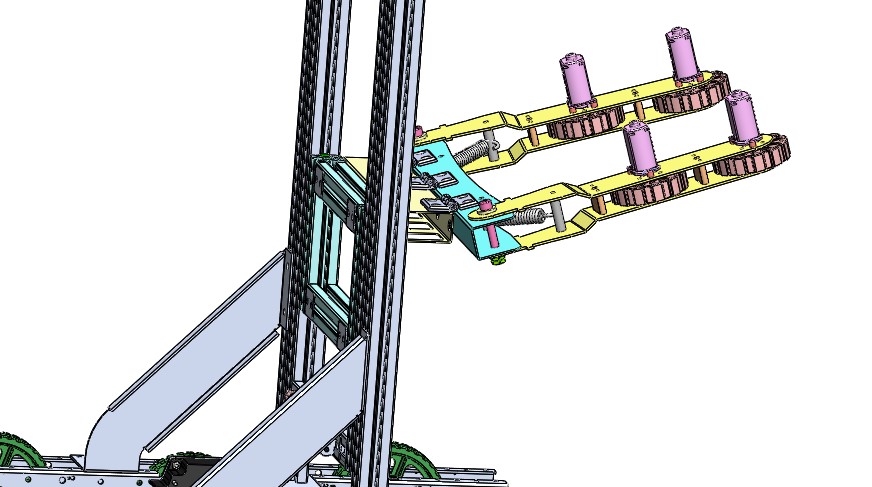
3.Gripper Aksamı
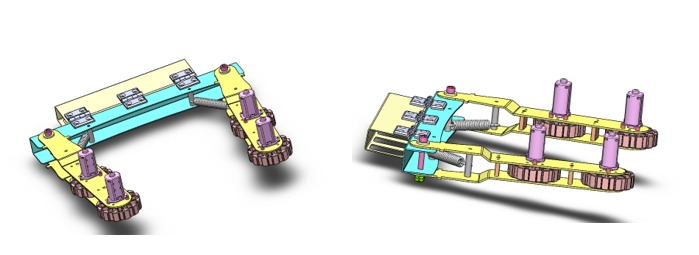
Gripper mekanizması ise kutu büyüklüğü olan 33, 33 ve 27 cm ebatlarını içine alacak şekilde iki adet sac levha ve lift mekanizmasına monte edilecek orta sac levhadan oluşmaktadır. Ayrıca robot kapalı halde bumper sınırlarını geçmemesi kuralı için yarışma başlamadan önce orta sac levhayı tutmayı sağlayan menteşeler ile açılır-kapanır mekanizma yapıldı. Burada yine yükten kazanmak adına sac levha kullanıldı. Gripper açılıp kapanma hareketi kutuya doğrudan yaylar vasıtası ile sağlanıp motor kontrolüne bırakılmamıştır. Motorlar, kutunun daha rahat alınması ve atılması için SOLIDWORKS’te tasarlanan ve 3 boyutlu yazıcıda üretilen dişli tekerleklerin döndürülmesini sağlamaktadır. Bu tekerlekler iç taraflarında barındırdıkları dişliler ile sac levha gövdesine bağlandı. Yine motor milinin ucuna da bu dişliye iç tarafından örtüşecek şekilde dişli konularak montaj yapıldı. Böylelikle kutu alınırken ve atılırken motorların çekiş ve itiş torku arttırılmış oldu. Bu yapıları da aşağıdaki görseller üzerinden inceleyebilirsiniz.
SOLIDWORKS Visualize ve FRC Yarışması
Tüm bu işlemler neticesinde robotun saha içindeki davranışlarını simüle etmek ve yarışmaya girmeden yarışmayı sanal ortamda yaşamak maksadıyla SOLIDWORKS Visualize Professional üzerinden çalışma gerçekleştirdik. Bu çalışmada Visualize Professional özelliği olan 360 derece sanal tur ile animasyon işlemi yapıldı. İlgili çalışmayı TEKYAZ YouTube kanalı üzerinden izleyebilirsiniz. Burada robotun hareketlerini ve çalışmasını rahat bir şekilde gözlemleyebilirsiniz.
SOLIDWORKS Visualize Professional ile FRC Simülasyonu
Bu yazımızda FRC Robotunu oluşturan mekanizmayı SOLIDWORKS üzerinden gösterip Robot mekanizmasının ne şekilde oluşturulduğunu işledik. Robot mekanizmasına uyumlu olacak şekilde çalışan elektrik aksamı ve programlamaya ise “Robot Nasıl Yapılır?-Elektrik-Elektronik ve Programlama” yazımızda değindik.